المراقبة المثالية للطائرة بدون طيار (UAVs)
لماذا المراقبة؟
ما الذي يجعل الطائرة بدون طيار (Drone) طائرة استطلاع مثالية؟
للاجابة على هذا السؤال، من المهم أولاً أن نفهم ماهية المراقبة.
تناقش عملية الأمن والمراقبة عن بعض احتياجات الإنسان الأساسية مثل: السلامة– كيف تتهيأ البيئة لضمان الأمن، وبالتالي سلامة الأفراد.
يعتبر الاكتشاف المبكر للتهديدات أو التسلل هو المفتاح الرئيسي للمراقبة، وهنا تتوفر القدرة على “الرؤية” ، مع الكاميرات الحرارية (التي تفوق رؤية العين المجردة)، حيث يمكن الحصول على ميزة تنافسية لتوقع الخطر وتحييده قبل وقوع الضرر.
تطبيقات (UAVs) في الأمن والمراقبة:
-الامن والمراقبة المحيطية.
-شبكات الاتصالات في حالات الطوارئ.
-مراقبة الحدود.
-المراقبة الساحلية البحرية.
-عمليات مكافحة القرصنة.
-السيطرة على الحشود (الجماهير).
-عمليات مكافحة الإرهاب.
-التحقيقات الجنائية.
-مراقبة حركة المرور.
مفاهيم الأمن والمراقبة:
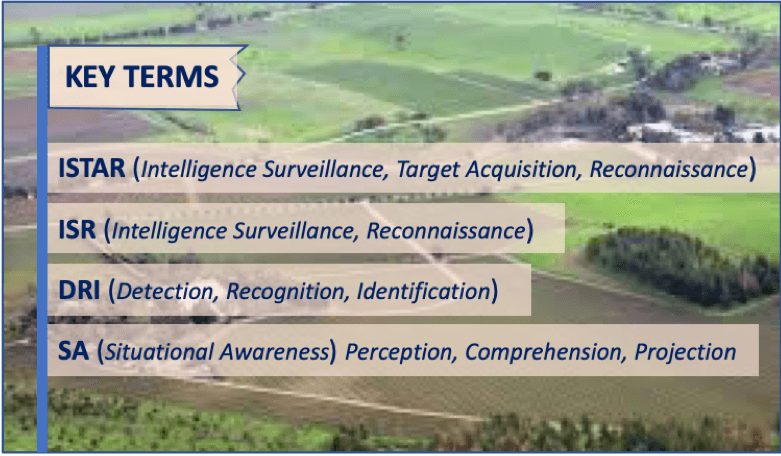
ISR
المراقبة هي جزء من الممرسات, وعادة يشار إليها باسم الاستخبار او الادراك, اوالاستطلاع والاستكشاف. ISR هي الاكتساب المتناسق والمتكامل من معالجة وتوفير معلومات دقيقة و متماسكة و مضمونة لدعم القرار التشغيلي في سياق أمني.
ISTAR
ISTAR هي مجموعة متنوعة من الاستخبار او الادراك, المراقبة, الاستطلاع و تتبع الاهداف (ISTAR) كل من هذه الممارسات تساعد في معرفة المواقع (SA) وفي الاستجابات التشغيلية للحوادث الأمنية. انها تعتمد على مجموعة من أجهزة الاستشعار الإلكترونية لتتبع المشهد, والذي يتضمن التنبيه وتحديد الكائنات وتتبعها ومعرفة المواقع, وايضا تميز او تحديد البيئة التشغيلية.
تعرف “ويكيبيديا” ISTAR بأنها “القدرة على جمع البيانات والمعلومات حول كائن ما, أو في منطقة ما او في مجال الاهتمام (AOI) على الدوام ومسيرة بالاحداث، أو على اساس محددباستخدام الصور والإشارات الاكترونية والطرق الاخرى لجمع البيانات”. بشكل عام، يتطلب هذا النوع من المراقبة عنصرًا من التخفي والسلاسة أو بصمة ضوضاء صغيرة لا تدكر وذلك لتجنب اكتشافها أيضًا.
– بوصفه مزيد من الثبات بأنه “يوفر تغطية يمكن التنبؤ بها لمنطقة الاهتمام AOI) Area of Intreset). تتكون معظم المعلومات الاستطلاعية الفضائية من مجموعة متععدة من الاقمار الاصطناعية التي تعمل بتناسق، أو تكون متكاملة بأجهزة الاستشعار أخرى, وذلك عندما تكون المراقبة مستمرة و مطلوبة لمنطقة ما.
DRI
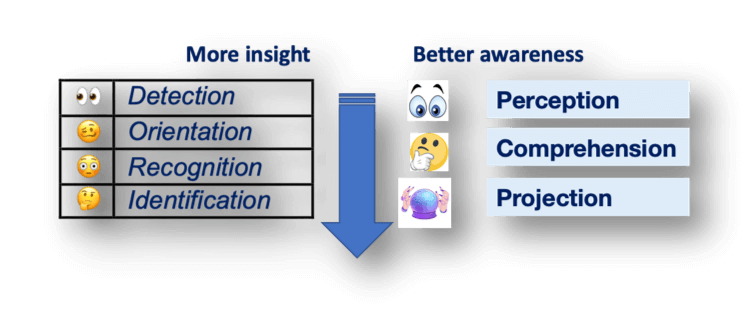
في الدوائر العسكرية، يتم استخدام الهوية إلى جانب الكشف والتعرف او التمييز كجزء من معايير DRI التي وضعها John Johnson. استخدمت هذه مصطلحات DRI ايضا في تطبيقات المراقبة.
الاكتشاف او المراقبة (Detection): أحيانًا نكتشف أو نلاحظ شيئًا ما يتحرك في مسافة، في حين نطلب دقة مختلفة لكل من هذه التطبيقات، لذلك يتعين علينا تحديد ما نعنيه قبل حساب الدقة.
الاتجاه او التوجه (Orientation): يركز هذا المعيار الإضافي على جانب الكائن أو اتجاهه.
التعرف (Recognition): في بعض الأحيان نستخدم هذا المصطلح عندما نريد التعرف على الكائن كرجل أو امرأة. في هذه الحالة، نحن مهتمون بكيفية تحرك الأشخاص أو المركبات ، بدلاً من تفاصيل (هوية) الكائنات.
التعريفاو التصنيف (Identification): في تطبيقات المراقبة، تعني عادة تحديد هوية الشخص، أو رقم لوحة الترخيص، أو ربما الأرقام الموجودة على ذيل الطائرة.
لتكون قادرة على تلبية هذه المعايير DRI، سوف تحتاج إلى اختيار الكاميرات الحرارية والضوئية المستخدمة في المراقبة. يتم قياس دقة الكاميرا الحرارية بشكل مختلف بالمقارنة مع دقة كاميرا IP الضوئية (المرئية) كما يلي: في الكاميرات الحرارية يتم قياس دقة الكاميرا باستخدام line pairs، وفي الكاميرات الضوئية (المرئية) يستخدم pixels/f او pixels/m. اي يتم تحديد مستوى دقة الكاميرات من وظائف DRI التي يمكن تنفيذها بشكل فعال. فيما يلي مقارنة بين متطلبات الدقة المختلفة لكل مستوى من متطلبات المعايير:
المسافة مقابل الدقة:
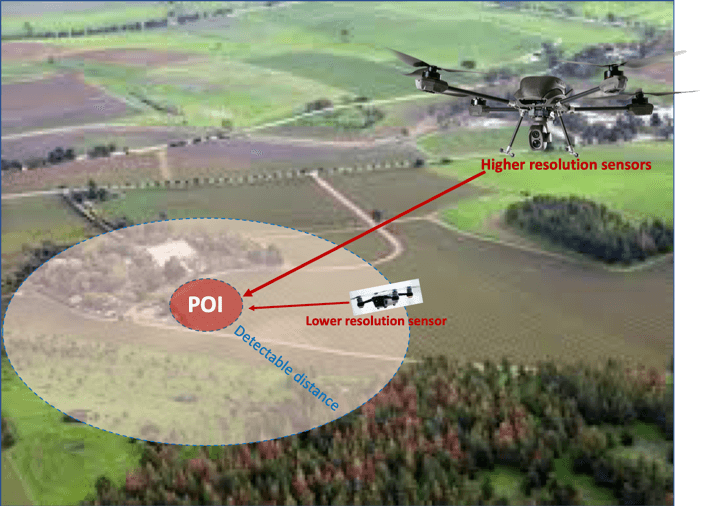

من الواضح، سيكون هناك مفاضلة او مقارنة بين التخفي او التسلل (المسافة) ومستوى التفاصيل الملتقطة (القرب)، أي بمعنى اخر, يمكننا الحصول على مزيد من التسلل او التخفي (المسافة) من نقطة الاهتمام (POI) عند استخدام جهاز استشعار أقوى وادق.
ISTAR
هي دمج العملية الاستخباراتية مع مهام المراقبة, لالتقاط الهدف والاستطلاع في تطوير الادراك لتحسين الوعي الموقعي للمشرف التشغيلي ومن ثم اتخاذ قراراته.
لذلك ، كيف يتم صنع كل هذا القرارخلال أنشطة المراقبة ؟
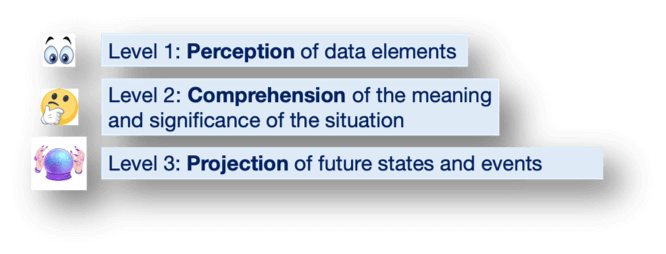
SA
يعتمد اتخاذ القرار خلال وضع العملية الأمنية وهو يعتمد علي الوعي الموقعي Situational Awareness. وفقًا لنموذج SA الذي طورته Endsley، هناك 3 مستويات تدريجية من الوعي يتم تمكينها من خلال مستويات بيانات DRI المتراكمة:
يكون لدى المشرفوين على الموقع الأكثر اسباقية مع مستويات أفضل من الفهم المستقاة من رؤية أفضل. يعد الاكتشاف المبكر أثناء عمليات الأمن والمراقبة أداة تمييز أساسية لتوفير ميزة تشغيلية أثناء الحوادث الأمنية (باستخدام اجهزة لاستشعارالحرارية والمرئية).
تحتوي المنصات الأرضية والجوية والفضائية على أدوار ISR الحاسمة في دعم العمليات بشكل عام. يمكن تحسين وضوح وعمق المعرفة او الادراك, من خلال تجميع موجودات ISR، والسماح بفترة من التدخل. يشمل ISR العديد من الأنشطة المتعلقة بتخطيط الأنظمة وتشغيلها، والتي تقوم بجمع ومعالجة ونشر البيانات لدعم العمليات الأمنية الحالية والمستقبلية.
يمكن استخدام أنظمة الطائرات بدون طيار sUAS (الصغيرة او المصغرة) بشكل فردي من أجل ISR أو بسبب قدرتها على الاقتراب من الأهداف, يمكن استخدامها ايضا كملحق رئيسي لأنظمة ISR بما في ذلك الأقمار الصناعية والطائرات المأهولة وأنظمة الطائرات بدون طيار وغيرها أو معدات جوية أو بحرية أو فضائية، وكذلك فرق الذكاء البشري. يمكن أن تتخذ بيانات الذكاء التي توفرها أنظمة ISR هذه أشكالًا متعددة، بما في ذلك الصور البصرية أو الرادارية أو الأشعة تحت الحمراء أو الإشارات الإلكترونية. يمكن أن تتخذ بيانات الاستطلاع التي توفرها أنظمة ISR أشكالًا متعددة، بما في ذلك الصور البصرية أو الرادار أو الأشعة تحت الحمراء أو الإشارات الإلكترونية.
معايير طائرة الاستطلاع بدون طيار (Drone):
- لذا، ما هي معايير الاختيار لطائرة استطلاع بدون طيار؟ بحيث يمكن للمرء أن يستخلصها من الشروط التشغيلية للمراقبة المذكورة أعلاه.
انخفاض مستوى اثار الضجيج / البصري (التخفي):
- من الواضح أن العديد من عمليات ISR تتطلب وجودًا سريًا والقدرة على اداء وظيفتها واجراء عملية المراقبة دون اكتشاف.
- لهذا ، فإن وجود تصميم المحرك الدوار (Brushless motor) يقلل من الضوضاء بالإضافة إلى وجود الحمولات القوية مثل اجهزة الاستشعار والتي تتيح مراقبة الأشياء المهمة أمر حيوي.
- الجمع بين انخفاض مستوى اثارالضجيج وصعوبة تميزها اثناء الليل.
توصية: عليك باختيار طائرة بدون طيار متعددة المحركات الدوارة (multi-rotor) ذات الشفرات الدوارة الكبيرة التي تقلل من بصمة الضوضاء لتصبح غير قابلة للتعريف (يصعب تمييزها او رؤيتها) وكذلك تشمل اجهزة الاستشعار الحرارية القوية، ويفضل أن تكون على مسافة أقل من 200 متر (على أي حال في هذه المسافة بالكاد يمكن تمييز الطائرة بصريًا).
قدرة التحمل:
- تتطلب عمليات المراقبة مستوى من الثبات ولهذا تعد أوقات الرحلات الطويلة من الأولويات.
توصية: في سوق طائرة بدون طيار متعددة المحركات الدوارة (multi-rotor)، معظم هذه الطائرات لديها أوقات طيران أقل من 30 دقيقة. يتم استهلاك الكثير من هذا أيضًا بواسطة وظيفة Return to Landing) RTL) لتحقيق أقصى استفادة من حمولة اجهزة الاستشعار، يُفضل الاحتفاظ به الحمولة بأطول فترة ممكنة لكل مهمة طيران, ويجب أن تتجاوز مدة الرحلة 50 دقيقة.
القدرة على المناورة:
- تعطي الأقمار الصناعية والطائرات بدون طيار High or Medium altitude long range) Male or Hale) مجال مراقبة منخفظة الدقة. في حين عندما تكون الاستجابة مسيرة بالاحداث, توفر الطائرات بدون طيار الصغيرة تكملة مثالية للخيارات الأخرى, عموماعندما يتطلب الأمر مستوى عالي الجودة و الفحص الدقيق, أو القدرة على الطيران او الرفرفة او الحوم حول نقطة (أو منطقة) الاهتمام (POI) اذا طلبت.
توصية: تتطلب نقطة الاهتمام POI فحصا دقيقا عند استخدام طائرة بدون طيار متعددة المحركات الدوارة طويل المدى وخصوصا العمليات التي تحركها الأحداث. ولكن يلزم أيضًا الوجود الدائم لهذا النوع من الطائرة المحمولة جوا. يمكن ايضا للطائرة متعددة المروحيات عالية التحمل توفير المزيد من الوظائف المحمولة جواً عند مجال نقطة الاهتمام POI.
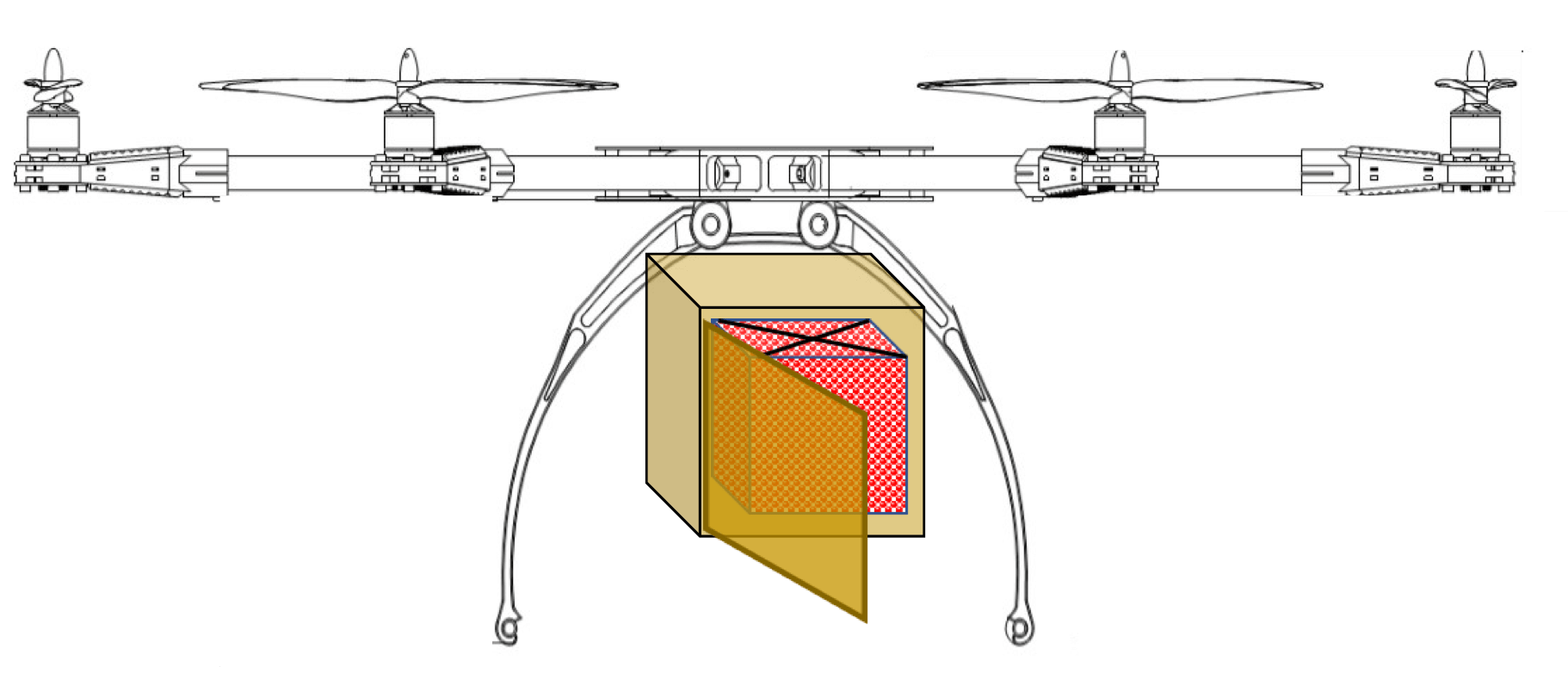
سعة عالية الحمولة (مع اجهزة الاستشعار المزدوجة):
- من أجل الحفاظ على مسافة كافية للمراقبة السرية، يتطلب وجود سعة حمولة كبيرة كافية, بحيث يمكنها حمل أجهزة الاستشعار القوية بدرجة كافية.
توصية: تلبي حمولات أجهزة الاستشعار (البصرية والحرارية) متطلبات DRI (انظر أعلاه), واجراء عملية المراقبة في المسافة المتوقعة من الهدف لتجنب الكشف كما هو موضح أعلاه.
اتصال عالي السعة:
- يوفر النطاق الترددي العريض والآمن على مدى ممتد ردود فعل في الوقت الفعلي أثناء ظروف التشغيل.
توصية: إذا كانت المراقبة والتفاعل في الوقت الفعلي مطلوبين في عمليات المراقبة، فإن قدرات وصلة تبادل البيانات المتطورة (high-end datalink) ضرورية جدا.
الاستشعار الذكي:
- تختص طائرة بدون طيار UAV على تتبع الاهداف ومرقبتها: تعمل هذه القدرة خاصةً عند اقترانها بـ AI، على إنشاء حل ISR متفوق وفعال للغاية في هذا المجال.


توصية: تعتبرمنصة الطائرات بدون طيار عنصر أساسي في عملية تتبع الاهداف ومرقبتها.
يسلط الجدول التالي الضوء على الفرق بين طائرات بدون طيار من فئة المستهلك و طائرات بدون طيار من فئة BVLOS
(Beyond Visual Line of Sight):
يتم توضيح قيمة كل دقيقة إضافية من وقت الرحلة كما هو مبين أدناه. عند استخدام طائرة بدون طيار للرد على حادث أمني يمكن أن يكون في أي اتجاه من نقطة الإقلاع، فإن مجرد مضاعفة وقت الرحلة يضيف نطاقًا أكبر من منطقة الإضطراب في كل مرة. تقديرات المساحة (متر2) المحتملة التي يمكن تغطيتها والتي تندرج تحت نطاق الطياران15كم , 30 كم و 60 كم (سرعة طيران 60 كم / ساعة):
الاستنتاج:
تشير المعايير المستخرجة من عمليات STAR النموذجية إلى الحاجة إلى وجود جوي مستمر وحكيم، وارتفاع الحمولة وعرض النطاقالترددي إلى جانب القدرة على ضبط مسارات الطيران في منتصف المهمة واكتشاف الهدف ومتابعته.
تعد مروحيات اوطائرات بدون طيار طويلة المدى متعددة المحركات (Multi-rotor or Multi-coptres) متطابقة مثاليا، إما مع المجالالجوي المتتد، البنية الاساسية للمراقبة الارضية والجوية أو كحل مستقل.
من أجل المراقبة والأمن، توفر شركة Airborne Drones طائرة الفانجارد (Vanguard) بدون طيار المحمولة جواً, ما يلي:
- وجود جوي مستمر معأوقات طيران طويلة.
- تحسين الوعي المكاني من خلال حمولات اجهزة الاستشعار القوية.
- الكشف التسلسلي المبكر باستخدام أجهزة الاستشعار الحرارية وبصمة الضوضاء منخفضة.
- اجراء العمليات الليلية مع أجهزة الاستشعار الحرارية.
- المرونة التكتيكية مع كل من المهام المنسقة والعمليات التي تحركها الأحداث.